
Objectif robustesse
La semaine dernière, petit souci d’hélices qui s’envolent. Finalement, le problème était surtout du à la fabrication « bricolage » des protos. Mais ça n’est pas une raison pour ne pas en tenir compte. J’ai donc consacré cette semaine à améliorer la résistance mécanique de notre Pioupiou.
Un jeu d’équilibriste
La pièce maîtresse, c’est l’hélice. Autant dire qu’il faut la soigner. Et c’est pas si simple.
Elle doit être suffisamment grande pour démarrer à des vents très faibles, tout en étant assez résistante pour tourner à des vitesses pouvant atteindre les 10 000 tours par minutes.
Le point clé, c’est l’équilibrage. Si elle a une pale plus lourde que les autres, ça vibre fort… très fort… trop fort… et ça explose !
Bref. J’ai fait pas mal de tests pour trouver la forme :
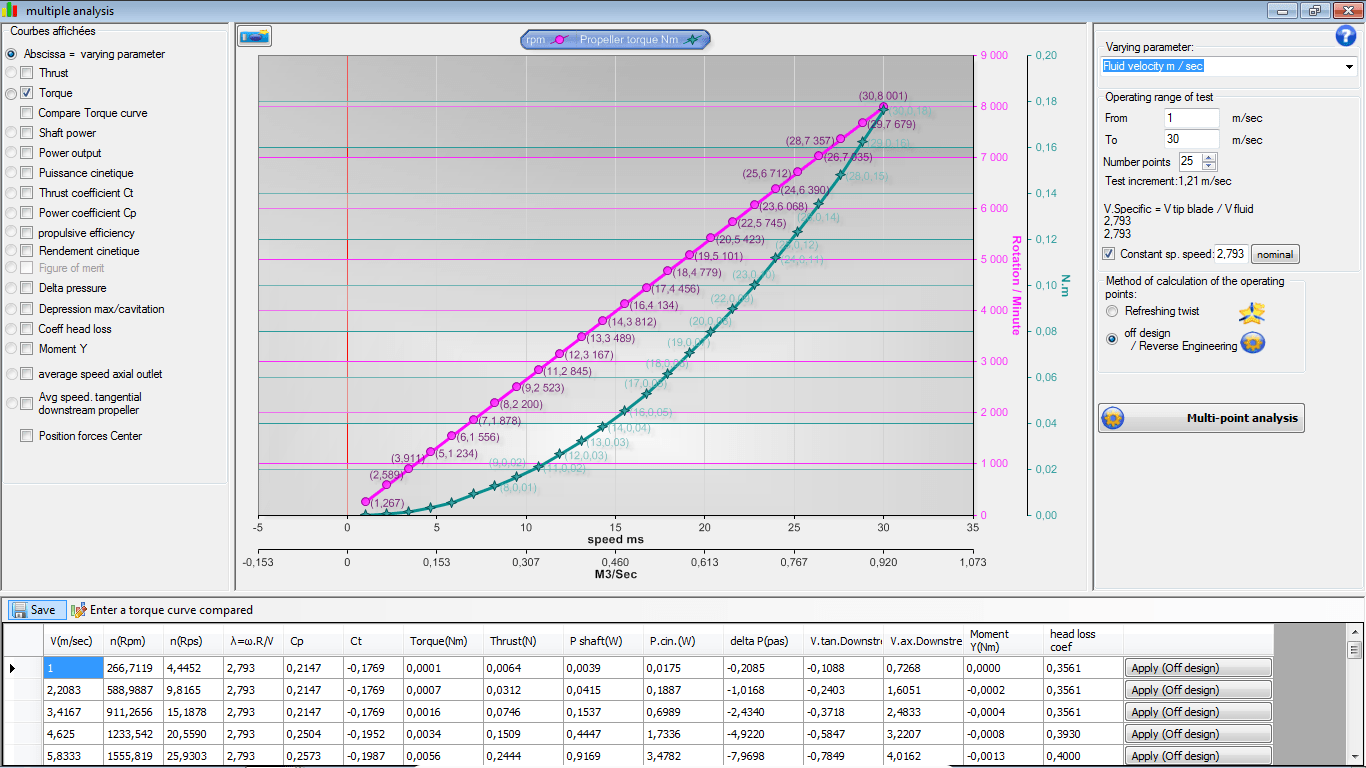
J’ai joué avec des logiciels de conception d’hélice :
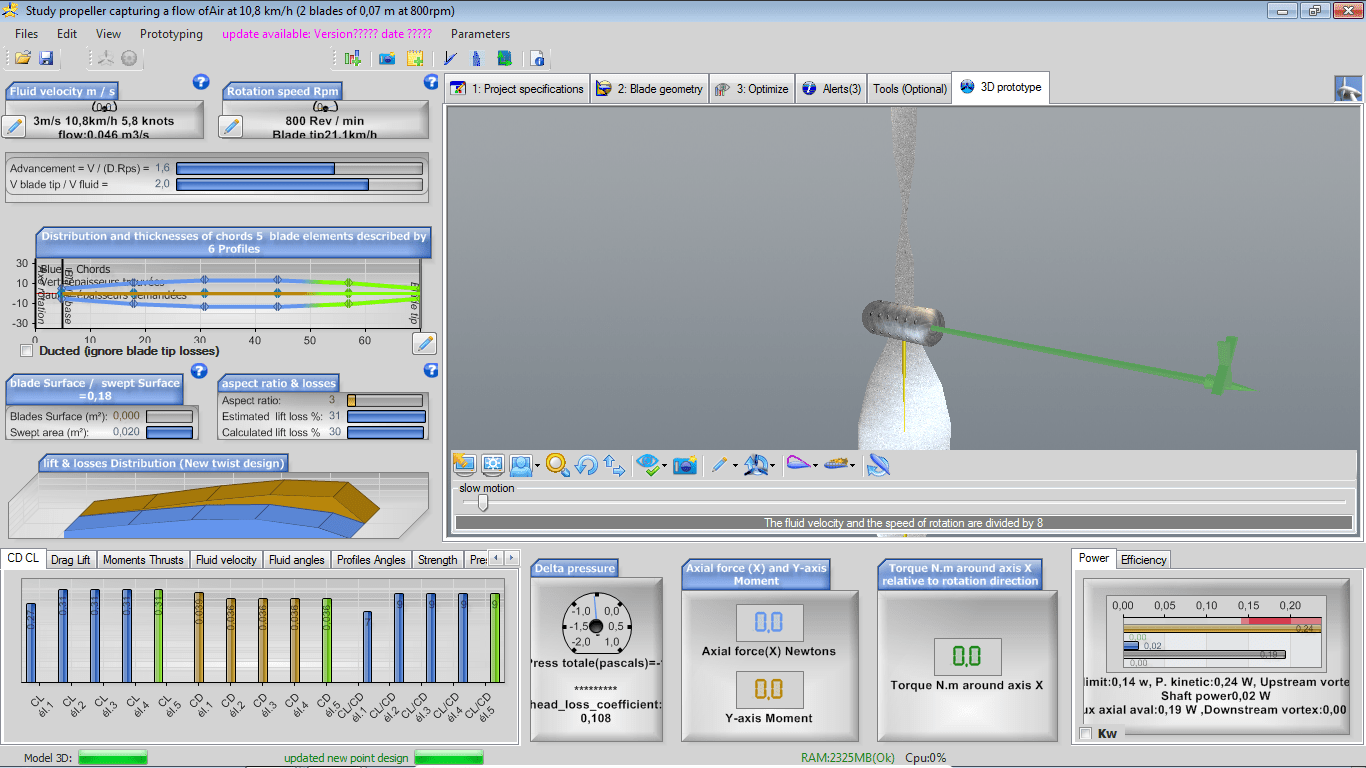
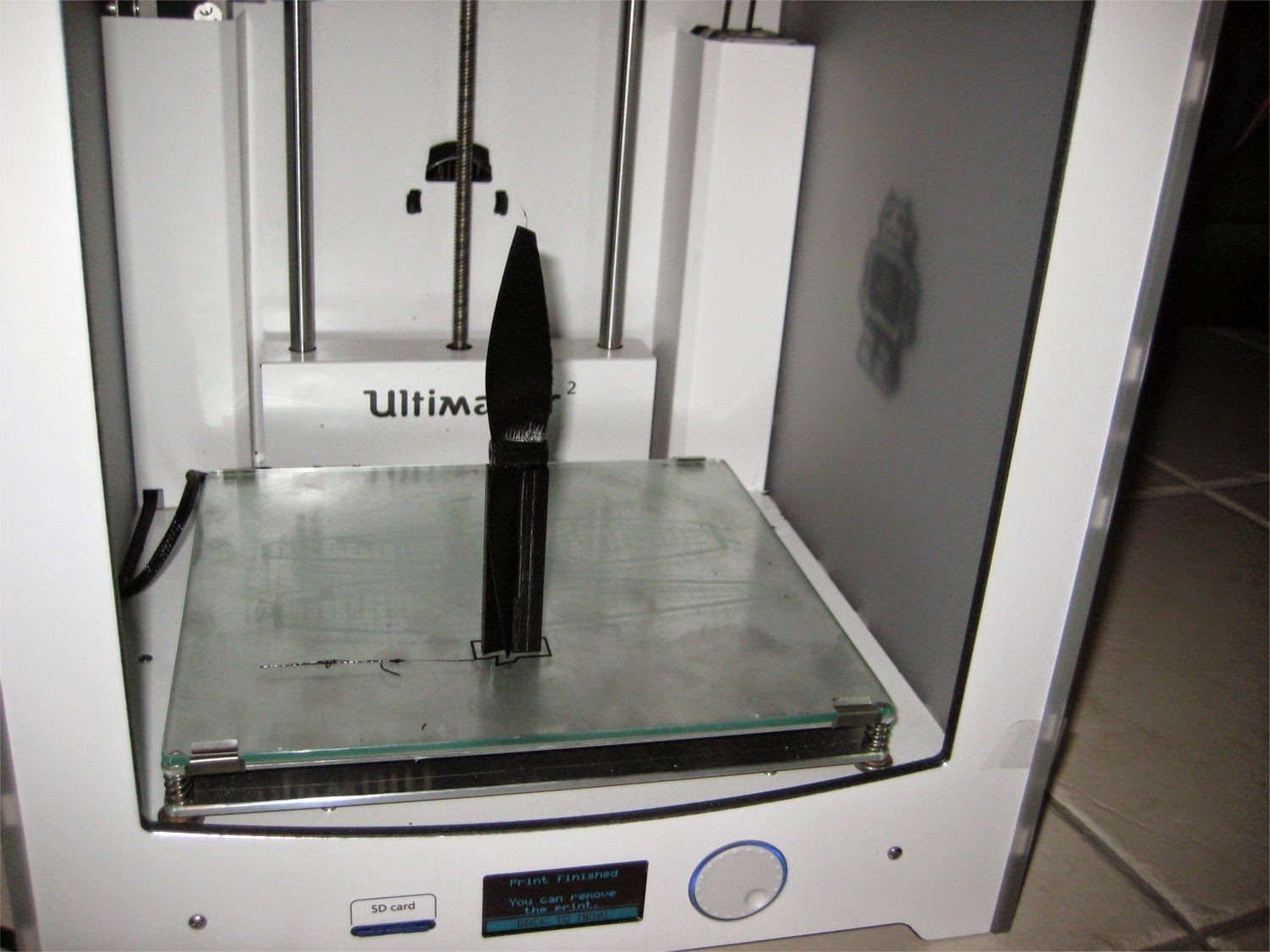
Et j’ai − encore − fait chauffer l’imprimante 3D :
(c’est vraiment magique ce machin là !)
Je n’ai toujours pas trouvé la forme finale. Mais je pense qu’on s’oriente vers une hélice courte et large − donc moins fragile −, optimisée pour les vents faibles : là où on a besoin d’efficacité.
Dans cette application, j’imagine qu’on est pas très gêné par le faible allongement et les pertes en bout d’ailes. Au contraire, c’est peut-être pas plus mal de freiner l’hélice lorsque le vent est fort ?
Petits zavions
On m’a proposé à plusieurs reprises d’utiliser des hélices de modélisme. Du coup je m’y suis intéressé, et j’ai testé.
Soucis :
La matière : Ces hélices sont faites en nylon. Ça absorbe énormément l’humidité (jusqu’à 10% de sa masse), ce qui modifie la résistance. Du coup, pas idéal pour une utilisation en extérieur.
La forme : elles sont conçues fines et allongées, pour une meilleur efficacité à des vitesses de rotation élevées. Du coup, il y a très peu de surface pour capter le vent faible. Les hélices « slow-fly » (= basses vitesses) s’en sortent un peu mieux, mais c’est toujours insuffisant.
Même pas peur
Pour améliorer la solidité, j’ai aussi revu la forme globale du Pioupiou (encore!).
Le fait d’ajouter une pile lourde a permis de ramener le centre de gravité par l’avant. Cela me permet donc de supprimer la tige en carbone qui pouvait faire peur.
Du coup ça donne quelque chose dans ce genre :


Ça avance bien, mais il y a encore du boulot !
21 réflexions sur « Objectif robustesse »
Allez courage et persévérance tu vas y arriver mais attention aux délais … j'ai des pots qui commencent a se lasser et fo pas …
Biz soit fort t'es sur la bonne voie !!!
Robert
Y'a rien de pire que de precipiter la sortie d'un produit. Je soutiens a 200% nico pour sortir un produit de qualite dont il soit fier.
Je partage ton point de vue, je préfère recevoir le piou un mois plus tard que prévu mais abouti. On a attendu jusqu'à maintenant on peut patienter encore un peu, ou bien!
Que la livraison soit retardée pour assurer la qualité, c'est respectable. Mais à quelques semaines de la livraison prévue à ceux qui a on pré-payé, aucune communication, ca craint du boudin non ?
Non mais s'il y a pas de communication à quelques semaines de la date limite, c'est parce que le mec bosse au fond pour respecter le délai de livraison, donc il reste peu de temps pour bla bla… je trouve ça très normale, quoi
Bah oué, ca lui prendrait tellement de temps de faire un point de quelques lignes sur le sujet dans un de ses blogs hebdomadaire =)
Aaah les groupies…
PS: j'ai essayé de poster avec mon compte google, mais ca foire.
J'ai du mal avec l'ironie de ce dernier commentaire. Nico envoie justement des nouvelles completes et detaillees de l'avancement du projet. Tu voudrais un planning avec les taches restantes et une estimation de leur duree ? Y'a beaucoup d'aleas dans la phase de conception d'un produit, il suffit d'un gros imprevu pour prendre 6 mois dans la vue.
Je ne vois pas en quoi le fait qu'il puisse y avoir des imprévus et des délais empêche de communiquer sur les plannings prévisionnels.
La campagne de crowdfounding annoncait une "livraison estimée en mars". Et ce, parce que Nicolas a bien conscient que les pré-acheteurs veulent savoir quand ils auront leur jouet. Ça reste vrai aujourd'hui.
Et oui, la publication des plannings et des milestones serait également appréciable. C'est un projet crowdfoundé et ouvert non ? =)
Du coup tu auras une échelle non linéaire pour convertir la rotation (rpm) en vitesse du vent? L'idée me plaît! Ainsi que la nouvelle forme, en effet ça paraît plus solide!
On se rapproche pas mal de quelque chose qui existe déjà. La fiabilité et robustesse ayant déjà été testé (en arctic…), je pense qu'il ne faut pas avoir peur de voir et éventuellement faire la même chose que ce qui existe sur le marché 😉 bon ok à 976dollars/pce… avec plage de vitesse à partir de 0m/s:
https://www.campbellsci.fr/05103-specifications
http://www.youngusa.com/products/7/5.html
Courage et bravo pour le job déjà fait! la solution finale est proche!
Ou encore plus simple au plan mécanique : http://www.lcjcapteurs.com
Pourquoi abandonner cette piste ?
Pourquoi pas de l'ultrason?
Je n'ai pas abandonné la piste de l'ultrason. Mais il faut passer pas mal de temps à étudier le sujet. Ça sera probablement pour un produit futur. Pour l'instant je n'ai pas le temps de tout réinventer.
Il y a pas mal de soucis à résoudre, notamment en terme de consommation électrique. La fonction « mesure » du Pioupiou consomme moins de 4 micro-ampères, alors que les capteurs ultrasons consomment en général 4 milli-ampères. C'est pas énorme, mais quand même 1000x plus !
L'étude du sujet est assez simple: Les maths c'est de la trigo, l'elec 4 transducteurs US + 1 switch I2C + ADC/DAC du module sigfox, l'info c'est une convolution et une recherche de max, la méca 4 trous en face d'une plaque.
La problématique de consommation électrique est évidente, mais peut-être facilement contournée en ne mesurant pas en continu: Si la mesure prend 10ms et qu'elle n'est faite que toutes les 10s, tu récupères le rapport 1000 sur la conso!
L'aspect statique et robuste d'une solution à base d'US relance le débat sur le panneau solaire et l'utilisation en condition extrême!
La balise ressemblerait plus au nid de pioupiou 🙂 http://img.nauticexpo.fr/images_ne/photo-g/capteur-girouette-anemometre-ultrasons-22283-3149543.jpg
Bonjour,
Il semble donc qu'on ait définitivement abandonné l'idée du capteur solaire. On a commandé un piou piou pour ma boite d'acoustique (mesures dans l'environnement) et là pas de problème avec la pile. Mais pour le parapente et notamment pour les balises appelées à être placées loin des déco (poru connaître le vent météo à 3000 pour un déco à 1500) donc pas accessibles souvent, ça ne me parait pas très pertinent. Après oui s'il faut changer l'accu solaire plus souvent que les piles, ça change rien. On ne pourrait pas avoir un option "solaire" à connecté à la balise si besoin ? Un boitier avec accu et panneau solaire dédié à la pioupiou ?
A plus et bravo pour cette belle aventure !
Pierre OSSAKOWSKY
Justement, là j'ai trouvé des piles qui tiennent aussi longtemps que les accus. Du coup ça ne change rien au calendrier de maintenance.
et un supercondensateur ne serait il pas la solution pour un boitier avec panneau solaire ?
http://www.lcjcapteurs.com/product/cv7sf-usb/ il semble qu'il existe un capteur anémométrique à ultrason alimenté par panneau solaire et par un petit supercondensateur. (pas de problème de vieillissement de batterie, et de température d'utilisation) et voici une preuve qu'une alimentation solaire marche aussi pour un capteur à US.
Hello
Comme discuté une fois au téléphone : une hélice au "mauvais" rendement est certainement plus stable dans le temps, ainsi que sa calibration vent/rpm. Une helice trop optimisée sera sensible aux salissure/givre/vieillissement le pbm existe sur les eoliennes.
En plus, qq info pseudo quantitative pour savoir quel paramètre faire varier :
* La vitesse d'équilibre dépend surtout du calage & du rendement
==> rpm*diametre/Vent # Cste* tan(90-calage) (Cste liée au rdt)
* La mise en rotation d'une hélice à faible vent dépend surtout de la surface de pale & du calage
==>Frottement=K*Spale*Diametre*V²*(90-Calage), avec K qui dépend du calage (en gros avec calage=90 K=1 & Calage=0 K=0 – et entre les deux une courbe en "S")
La définition du calage éatnt l'angle que fait la pale avec le disque hélice à 75% du diamètre (calage=90–> hélice en drapeau)
Donc
* Pour ne pas pédaler trop vite quand il y a du vent il faut un calage d'helice vers le drapeau et un allongement de pale faible (pas trop de rdt).
* Pour démarrer a faible vent il faut de la surface de pale & un calage "intermediaire"
Si bien qu'une hélice trapue semble être une bonne idée (max de surface à diamètre donnée & pas trop de rdt) et la variable à intuiter reste le calage, pour trouver le compromis démarrage faible vent versus proportionnalité vent/rpm pas trop forte.
Avec tes calcul d'hélices, le point clef est la courbe Cp=f(V/(rpm*D)), et le V/(rpm*D) pour lequel Cp=0. Si tu as des courbes je peux t'aider à choisir.
A par ca :
– quid du remplacement des piles avec le Pioupiou GPS ?
– sur les délais, les jours rallongent & la saison va finir par arriver…
Matthieu
Qui a commandé un Pioupiou GPS
– Toute hélice doit être équilibrée individuellement. Le problème est d'avoir une balance d'autant plus sensible que l'hélice est légère pour faire cet équilibrage par approximation successive à coup de lime. C'est assez délicat mais indispensable pour éviter les vibrations. La vibration résiduelle peut être mesurée en mettant l'hélice en rotation rapide et en mesurant l'amplitude des vibrations avec des accéléromètres sur le support de l'axe.
– Côté délai, je pense qu'il ne faut pas mettre la pression. En tant qu'ingénieur dans l'industrie électronique, je peux vous dire que créer un produit en 6 mois est illusoire. En soutenant le projet de Nicolas il ne faut pas attendre un produit en retour, mais juste prendre part à une aventure collective et en accepter les risques.
Courage, Nico !
Pascal C
Concernant les mesures à Ultrasons et la conso: il en existe déjà des autonomes avec un petit panneau solaire (et une super-capacité ou super-condensateur) sur le capteur à Ultrasons… 🙂 Il envoie des donné à un module de com qu'il faudrait remplacer par un module de com sigfox (avec une pile ou un panneau pour la conso de l'envoi des données): c'est celui ci:
http://www.lcjcapteurs.com/product/cv7sf-usb/
Un acheté un, pour voir comment il est conçu et refaire la même chose en meilleur marché ?…
Courage courage! et félicitations pour tout le chemin déjà parcouru! On se réjouit du résultat, qu'elle qu'il soit! 🙂